P1
Using LSTM Deep Learning Technology to Adjust PID Control in the Application of Inverted Pendulum
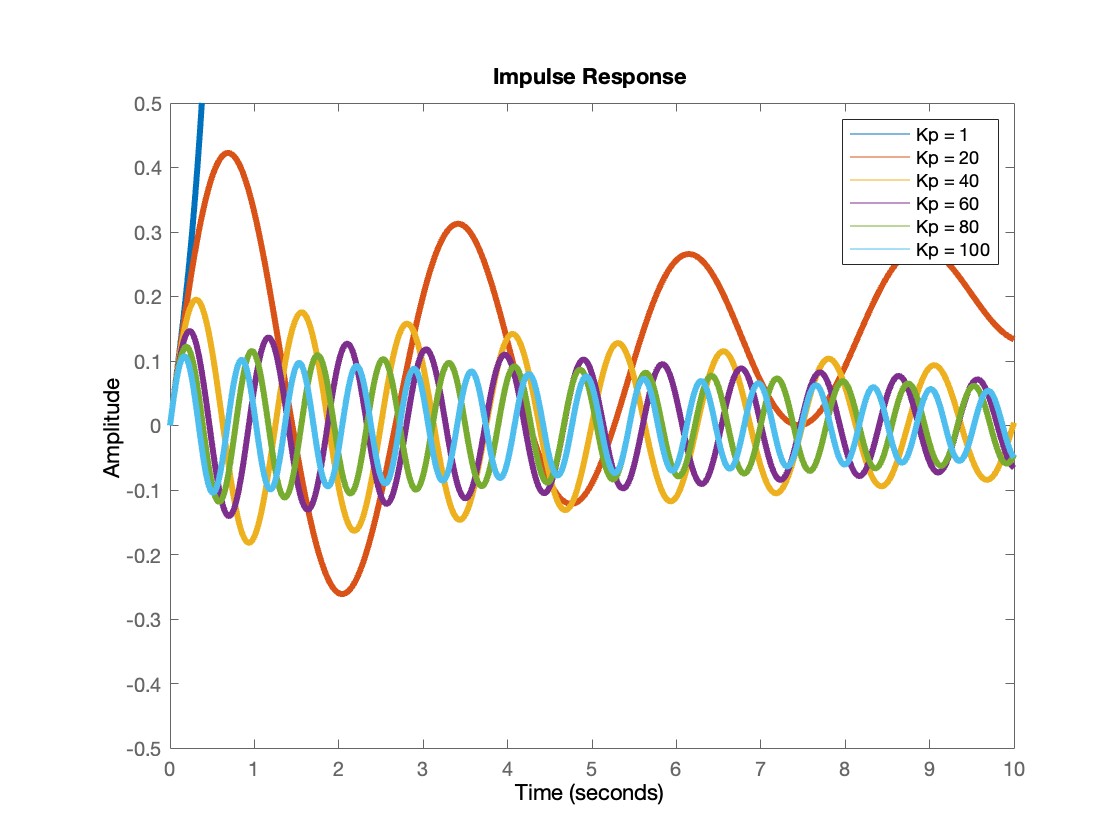
This study aims to design a PID controller that can tune nonlinear systems effectively. The PID controller uses LSTM, a RNN algorithm to enhance its performance, using time series data to predict PID parameters promptly.