
四旋翼無人機與桌上型機器人協作遠端觀測之應用
摘要
我們看到火星探測車毅力號成功登陸後,開啟了我們對遠端觀測的興趣,並思索是否能將遠端觀測這項技術實際應用在生活中,因此開啟我們做此研究。而我們選擇的方法則為透過四旋翼無人機與桌上型機器人的製作,結合機器學習進行影像辨識,將遠端觀測的操作與研究方法簡易化,使其能在生活中實際應用。
研究目的
- 四旋翼無人機和桌上型機器人設計與製作
- 桌上型機器人與無人機間資料傳輸與影像辨識
研究過程與方法
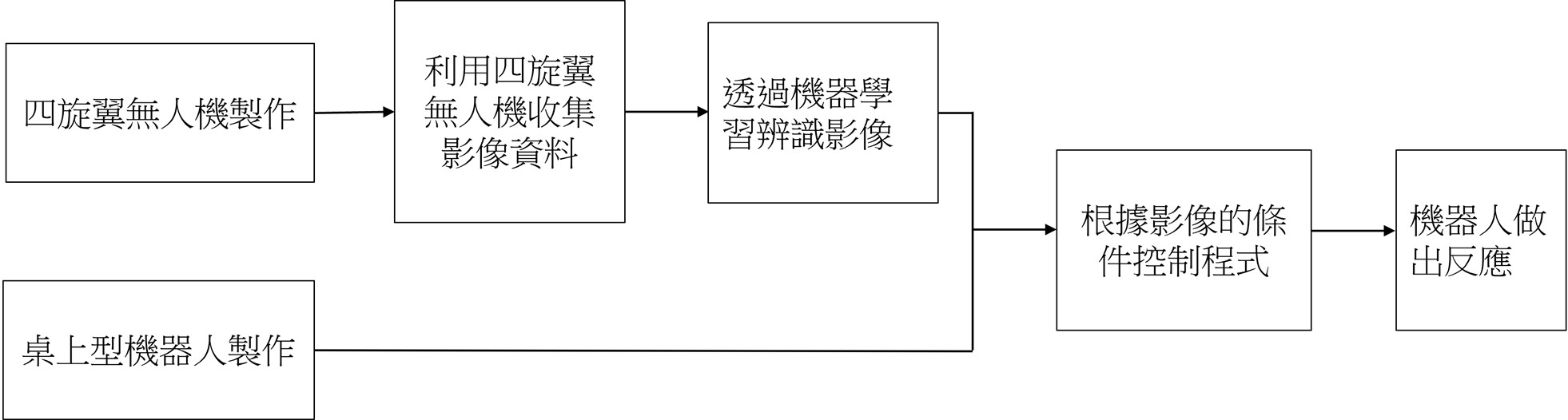
研究成果與展望
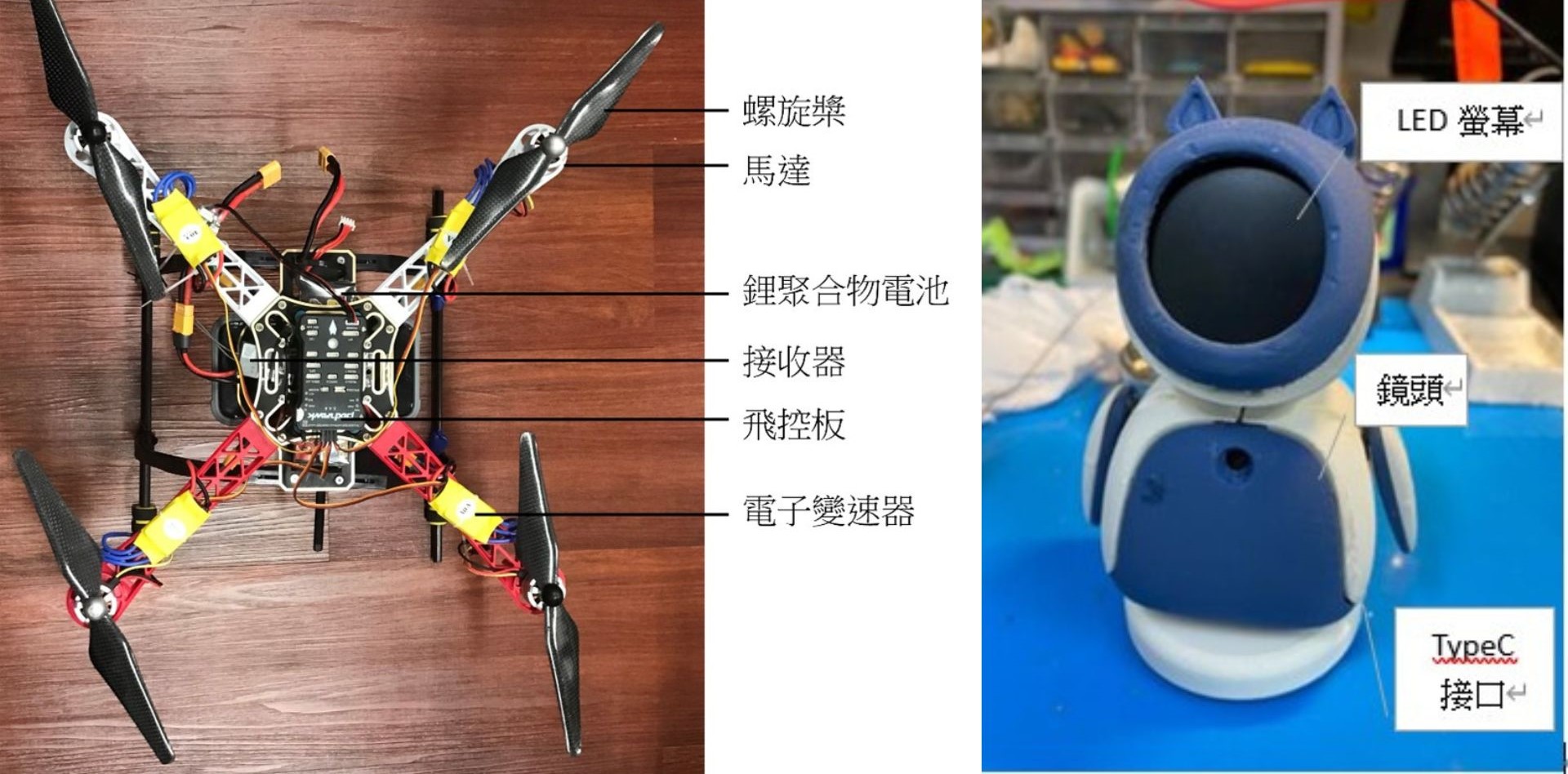
架設好的四旋翼無人機與桌上型機器人:
我們認為遠端觀測有其可行性,未來可進一步將電腦的部分功能搭載至晶片上使得通訊不需透過電腦中繼,使得資料延遲的時間變短,提高傳輸效率,也同時減小體積增加令其更方便移動,並增加可能性。
Back